
a) A potential function of the form given by Eq. (4) with k = 4. (b)

Landmark-Guided Shape Formation by a Swarm of Robots
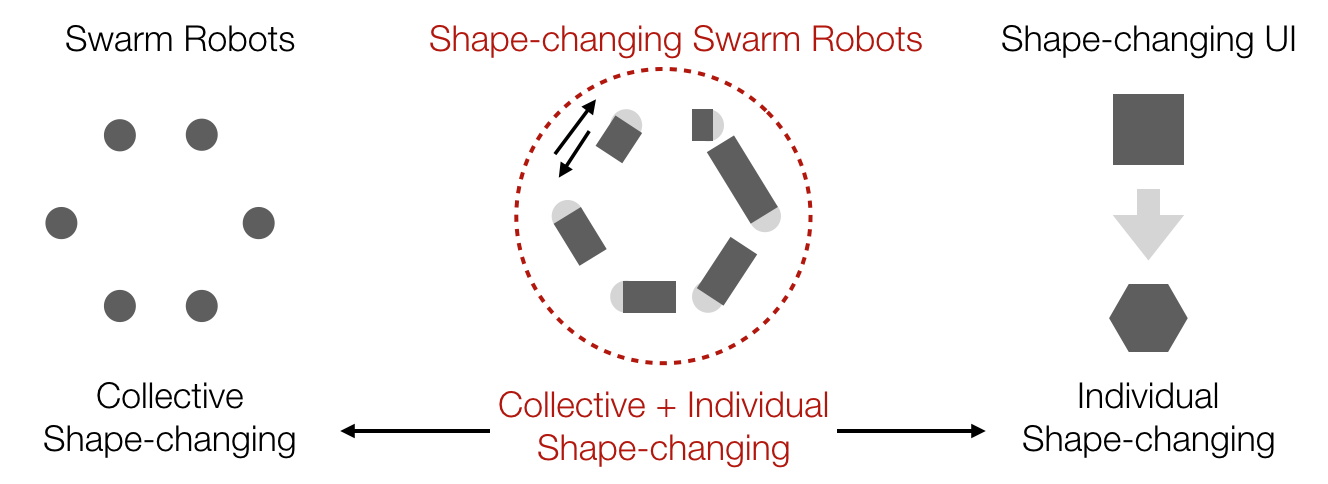
ShapeBots: Shape-changing Swarm Robots

IEEE-ICRA-2022] Robust Localization of Occluded Targets in Aerial Manipulation

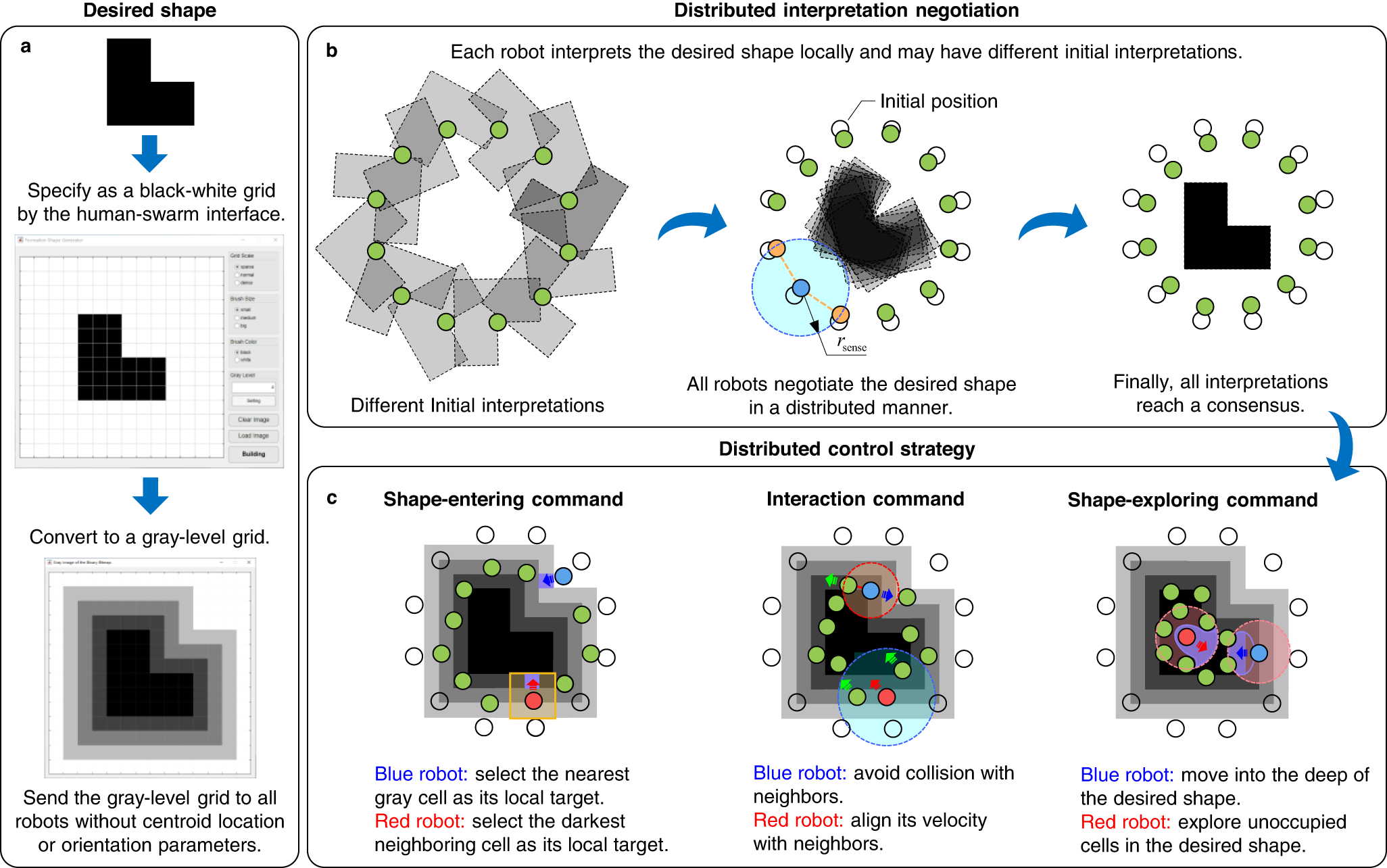
Mean-shift exploration in shape assembly of robot swarms

Generating Goal Configurations for Scalable Shape Formation in Robotic Swarms

Roderich Gross on LinkedIn: Mean-shift exploration in shape assembly of robot swarms - Nature…

Mean-shift exploration in shape assembly of robot swarms

GitHub - WestlakeIntelligentRobotics/Human-swarm-interface

Ordo Fraterna Fibonacci on LinkedIn: Adaptive advantages of restorative RNA editing in fungi for resolving…
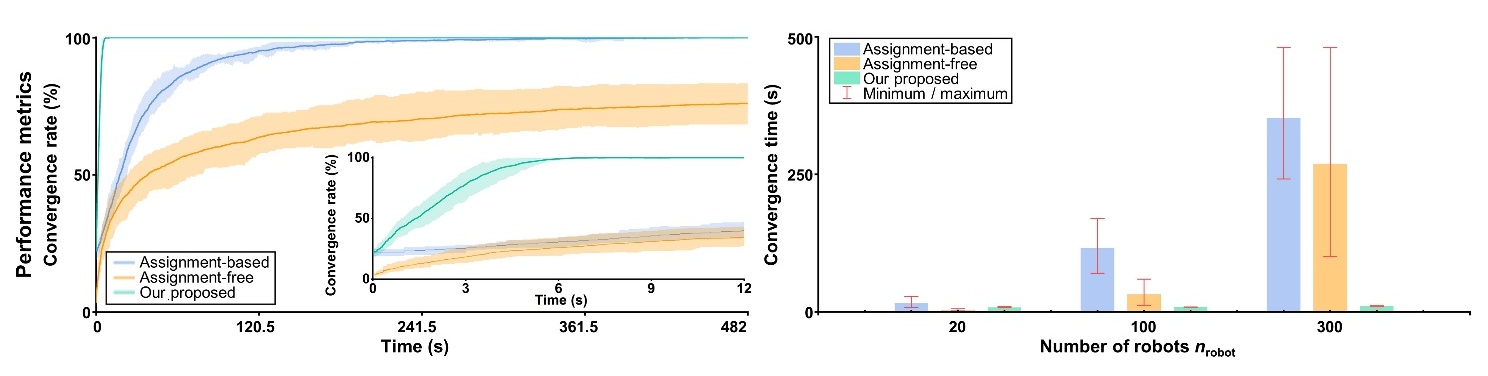
Mean-shift Exploration Strategy Enhances the Efficiency of Robot Cooperation

Example images for the denoising task Row a contains original images


:max_bytes(150000):strip_icc()/joansmalls_305752493_158587186775748_3816707608830659706_n-7d96ade28d5042cdad95341dcbcf21f3.jpg)
:max_bytes(150000):strip_icc()/eyebrow-shape-GettyImages-1194724839-20e5c0d31e924288ac4e6fd442c90598.jpg)





/product/21/5854832/1.jpg?2065)
