This paper presents the conceptual and functional design of a novel hybrid leg-wheel-track ground mobile robot for surveillance and inspection, named WheTLHLoc (Wheel-Track-Leg Hybrid Locomotion). The aim of the work is the development of a general-purpose platform capable of combining tracked locomotion on irregular and yielding terrains, wheeled locomotion with high energy efficiency on flat and compact grounds, and stair climbing/descent ability. The architecture of the hybrid locomotion system is firstly outlined, then the validation of its stair climbing maneuver capabilities by means of multibody simulation is presented. The embodiment design and the internal mechanical layout are then discussed.
GM Crafts World Book Day Free Cut Files For All Machines Tutorial layering HTV with Transfers. - GM Crafts
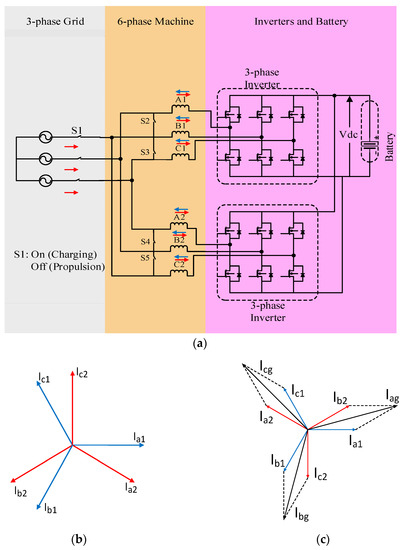
Machines, Free Full-Text
Shredding Machines: Types, Applications, Advantages, and Standards, shredder machine
Machine Font by Storytype Studio · Creative Fabrica
Manufacturing of the surfaces of spline fitting connection The International Journal of Advanced Manufacturing Technology, Spline
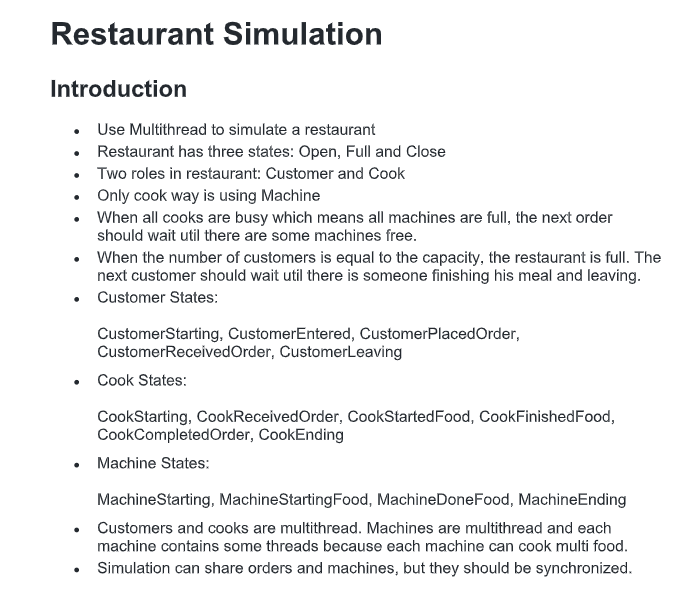
Solved Introduction - Use Multithread to simulate a
Shredding Machines: Types, Applications, Advantages, and Standards, shredder machine
Silent Partner Best Portable Ball Machine
PDF) Influence of Hub Parameters on Joining Forces and Torque Transmission Output of Plastically-Joined Shaft-Hub-Connections with a Knurled Contact Surface
Machines, Free Full-Text, shredder machine
Shredding Machines: Types, Applications, Advantages, and Standards, shredder machine
machine specials
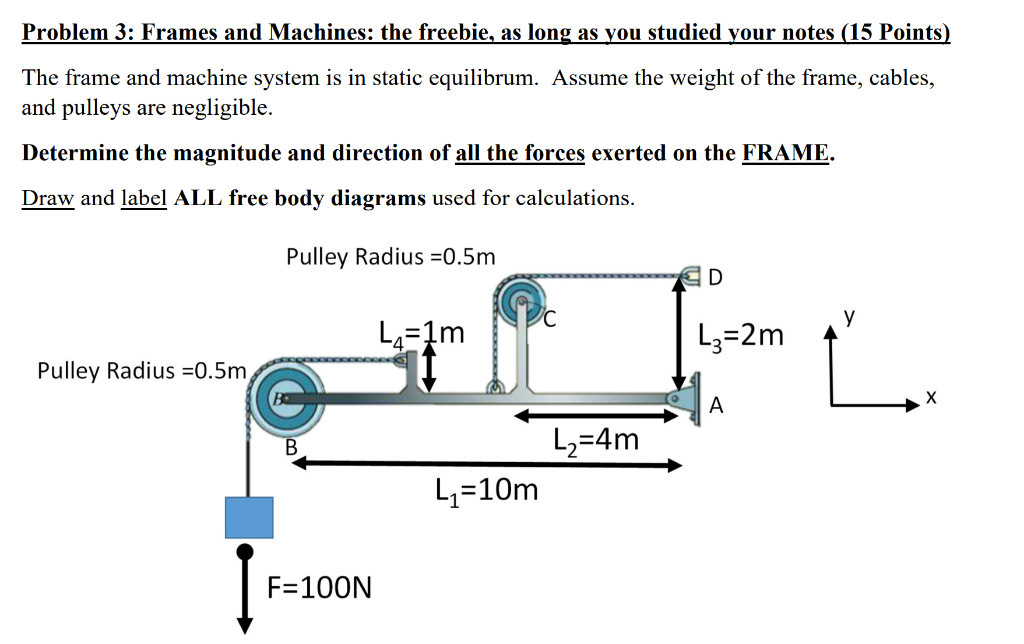
Solved Problem 3: Frames and Machines: the freebie, as long