Review Paper: Real-Time Grasp Detection Using Convolutional Neural Networks, by Isaac Kargar, Aidrivers Ltd.

Nak CHONG, Professor (Full), Doctor of Philosophy, Japan Advanced Institute of Science and Technology, Komatsu, School of Information Science
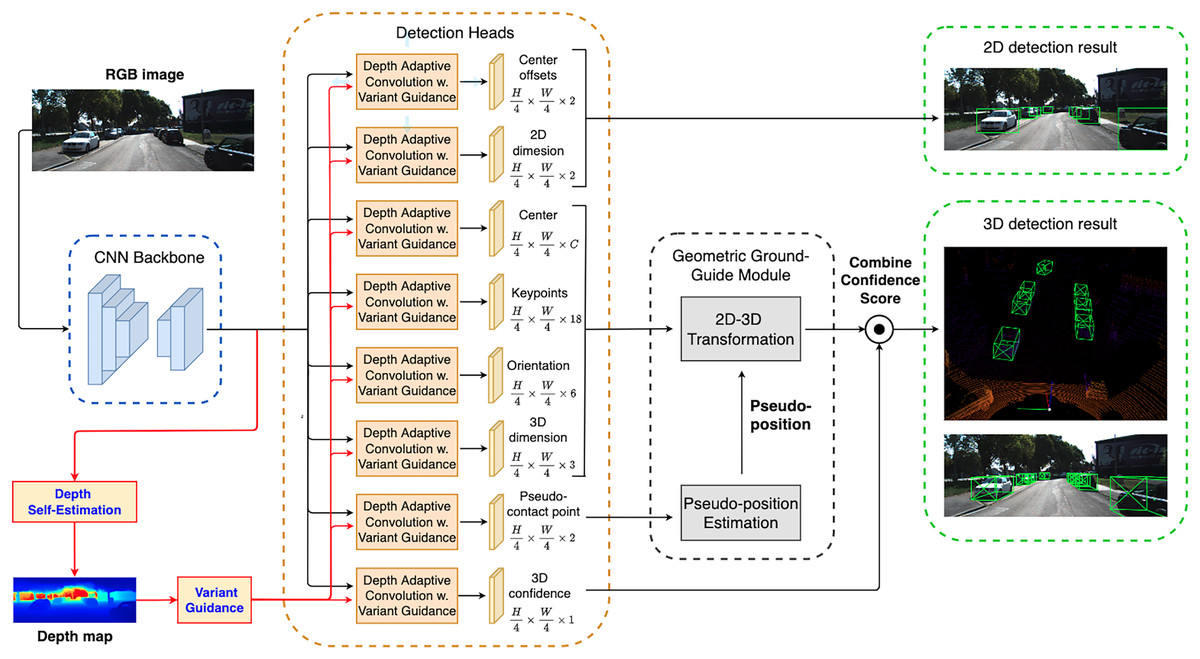
eGAC3D: enhancing depth adaptive convolution and depth estimation for monocular 3D object pose detection [PeerJ]

Nak CHONG, Professor (Full), Doctor of Philosophy, Japan Advanced Institute of Science and Technology, Komatsu, School of Information Science
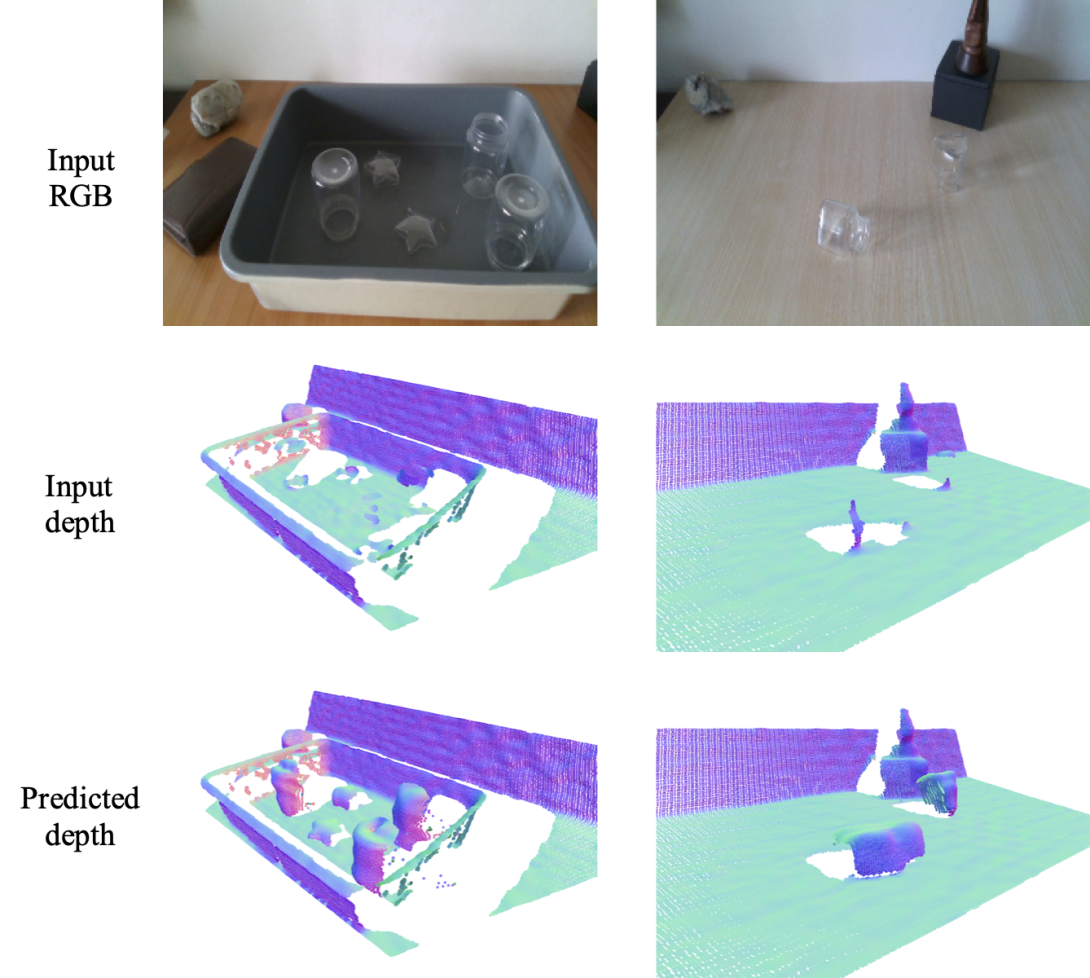
RGB-D Local Implicit Function for Depth Completion of Transparent Objects
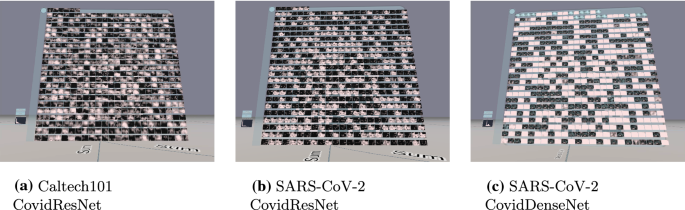
A walk in the black-box: 3D visualization of large neural networks in virtual reality

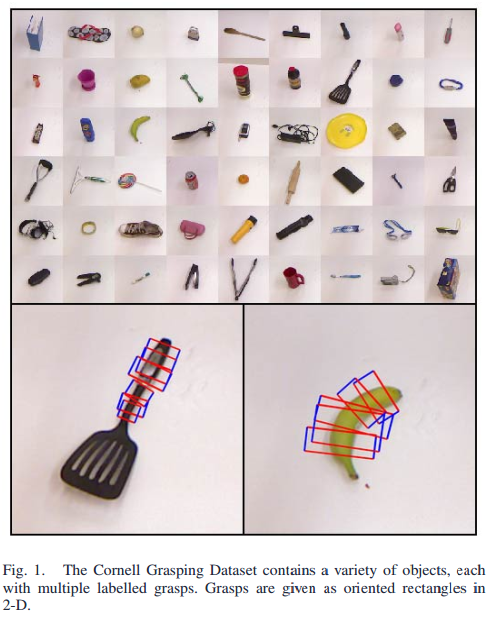
Convolutional multi-grasp detection using grasp path for RGBD images - ScienceDirect

Review Paper: Real-Time Grasp Detection Using Convolutional Neural Networks, by Isaac Kargar, Aidrivers Ltd.

Control diagram of the omni-directional robot.

Spot going to waypoint placed by operator

Attack visualization for GR-ConvNet-RGB-D on OCID grasp dataset. The

Control diagram of the omni-directional robot.